
1.3 Симуляцийн орчинд програм бичиж сурцгаая
Энэ хэсэгт бүгдээрээ Германы боловсролын Ухаалаг шинжилгээ, мэдээллийн
системийн институт (IAIS)-ын санаачилгаар хөгжүүлэгдсэн “Роберта –Роботтой суралцах нь” нэртэй програмчлалын орчинг ашиглаж програм бичих аргад суралцацгаая.
Нээлттэй Роберта лаборатори /https://lab.open-roberta.org/ нь хэрэглэгчид, ялангуяа хүүхэд, өсвөр насныханд NEPO® хэмээх график програмчлалын хэлийг ашиглан төрөл бүрийн робот, микроконтроллеруудыг хялбар програмчлах боломжийг олгоход зориулагдсан.
Энэхүү платформ нь LEGO® MINDSTORMS® EV3, NXT роботууд болон Ардуино хавтанд суурилсан роботууд зэрэг төрөл бүрийн техник хангамжийн системийг дэмжин ажиллах боломжтой. Нээлттэй-Роберта лаборатори нь визуал програмчлалын аргыг ашигласнаар анхлан суралцагчдад зориулсан сургалтын үйл явцыг хялбаршуулж, програмын команд бүхий блокуудыг угсарч програмыг бичнэ.
Вэбд суурилагдсан энэхүү симуляцийн програм нь суулгах шаардлагагүй бөгөөд вэб хөтөч бүхий ямар ч төхөөрөмжөөс хандах боломжтой тул cургалтын танхимаас гадна гэрийн нөхцөлд онлайнаар суралцахад тохиромжтой. Энэхүү платформ нь англи, герман, франц, испани болон бусад хэлээр олон хэл дээр ашиглах боломжтой бөгөөд энэ нь дэлхий даяарх хэрэглэгчдийн хүртээмжийг өргөжүүлж байна.
Open Roberta Lab нь физик роботуудыг програмчлахаас гадна хэрэглэгчид өөрсдийн программыг виртуал робот дээр туршиж үзэх боломжтой симуляцийн орчныг санал болгодог.
Энэ функц нь физик тоног төхөөрөмж ашиглахгүйгээр туршилт хийх, суралцах боломжийг олгодог.
Уг төслийг анх Google.org санхүүжүүлсэн бөгөөд програмчлалын боловсролыг илүү хүртээмжтэй, сонирхол татахуйц болгох, ялангуяа эмэгтэй оюутнуудыг STEM талбарт суралцахыг дэмжих зорилготой юм. Нээлттэй Роберта байгуулагдсан цагаасаа хойш 120 гаруй орны хэрэглэгчдэд хүрч, програмчлал, робот техникийн чиглэлээр дэлхийн боловсролын хүчин чармайлтад ихээхэн хувь нэмэр оруулж байна.
Open Roberta Lab онлайн симуляц дээр ажиллахын тулд Firefox эсвэл Opera бол вэб хөтөчийг ашиглаарай.


Бүгдээрээ нээлттэй-Роберта лабораториийн / https://lab.open-roberta.org/ Open Roberta Sim E.V3 IeJOS 0.9.1 симуляцмийн талбарыг ашиглан програм бичицгээе.
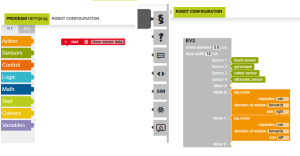
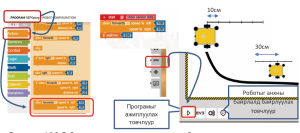
Нээлттэй- Роберта лабораториийн Open Roberta Sim E.V3 ийн талбар нь блок програмчлалын PROGRAM NEPOprog талбар болон оролт, гаралтын төхөөрөмжийн ROBOTCONFIGURATION талбар гэсэн хоёр хэсгээс бүтнэ.
1.3.1 Симуляцийн орчинд загварыг хэрхэн хялбар зохион бүтээх вэ?
Бид “Open Roberta Lab” симуляцийн орчныг ашиглан оролт гаралтын төхөөрөмжүүдийг програмчлах, өөрсдийн программыг виртуал робот дээр туршиж үзэх зэргээр физик тоног төхөөрөмж ашиглахгүйгээр хэрхэн туршилт хийх, суралцаж болохыг мэдэж авлаа.
Иймд зохион бүтээгчид эхлээд “Ямар зориулалттай робот зохион бүтээх вэ? гэсэн асуултыг тодорхойлон дараах алхмуудыг хийнэ. Үүнд:
A. Роботын гүйцэтгэх үйлдэл, даалгаврыг тодорхойлох
B. Өгөгдсөн даалгаварт тохируулан роботын удирдлагын төхөөрөмжинд мэдрэгч,моторын холболтыг хийж загварчлах
C. Өгөгдсөн даалгаврын дагуу явах роботын талбарыг бэлтгэх
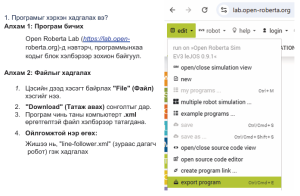
D. Програмыг хадгалах болон хадгалсан програмыг дахин ашиглах
E. Робот удирдлагын төхөөрөмжийг програмчлах
A. Роботын гүйцэтгэх үйлдэл, даалгавартай танилцах:
Даалгавар 1.3. “Open Roberta Lab” симуляцийн орчинд хоёр дугуйтай роботын дугуйны радиусыг 5.6 см, дугуй хоорондыг зайг 18 см байхаар роботыг загварчлан, роботыг эхлэх цэгээс 30 см урагш явахаар тооцоолон програмын кодыг бич.
B. Өгөгдсөн даалгаварт тохируулан роботын удирдлагын төхөөрөмжид мэдрэгч, моторын холболтыг хийж загварчлах:
Open Roberta Sim E.V3 ийн оролт, гаралтын төхөөрөмжийн ROBOT CONFIGURATION талбарыг сонгож роботын мотор, дугуйнуудын холболтыг хийцгээе.
Роботын дугуйны радиусыг 5.6 см
Хоёр дугуйны хоорондыг зайг 18 см болгон тохируул

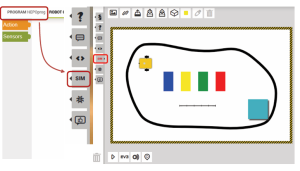
С. Өгөгдсөн даалгаврын дагуу явах роботын талбарыг бэлтгэх
Open Roberta Sim E.V3 ийн PROGRAM NEPOprog талбар дахь SIM товчлуурыг
дарж роботын туршилтын талбарыг сонгоно.
D. Програмыг хадгалах болон хадгалсан програмыг дахин ашиглах
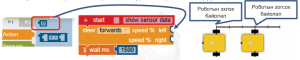
E. Робот удирдлагын төхөөрөмжийг програмчлах
Роботыг эхлэх цэгээс 30 см урагш яваад зогсохоор тооцоолон програмын кодыг бич.
1. Роботын моторын хурдыг эхэлж сонгоод, явах хугацааг өөрчлөн тохируулах
2. Роботын явах хугацааг эхэлж сонгоод, роботын хурдыг өөрчлөн тохируулах
3. Роботын хурд болон явах хугацааг хоёуланд нь өөрчлөн тохируулах
Даалгавар 1.3.1. Роботын моторын хурдыг эхэлж сонгоод, явах хугацааг өөрчлөн тохируулах програмын кодыг бич.
Гүйцэтгэл 1.3.1. Өгөгдлийн дагуу даалгаврыг гүйцэтгэхийн тулд моторын хамгийн дээд хурд буюу 100% гэсэн сонголтыг хийж доорх дарааллын дагуу үйлдлийг гүйцэтгээрэй.
Даалгавар 1.3.2. Роботын явах хугацааг эхэлж сонгоод, роботын хурдыг өөрчлөн тохируулах програмын кодыг бич.
Гүйцэтгэл 1.3.2. Өгөгдлийн дагуу даалгаврыг гүйцэтгэхийн тулд роботын явах хугацааг 1500 милсекунд байхаар сонгоод, роботын хурдыг өөрчлөн тохируулаарай.
Даалгавар 1.3.3. Роботын явах хугацааг 600 милсекундээс их, роботын хурдыг 70 хувиас бага байхаар тохируулан програмын кодыг бич.
