
Симуляцийн орчин дахь хөдөлгөөнт роботын програмчлал нь бодит ертөнцөд
роботыг бүтээхээс өмнө роботын үйл ажиллагааг загварчлах, турших, хөгжүүлэх боломжийг олгодог. Энэ нь роботын алгоритмуудыг аюулгүй, үр ашигтайгаар туршихад чухал үүрэг гүйцэтгэдэг.
3.1. Физикийн хичээлээр олж авсан мэдлэгээ роботын явах замыг тооцоолоход хэрхэн ашиглах вэ?
Роботын удирдлагын төхөөрөмжийг зохион бүтээж, загварчлахад биетийн кинематик тооцооллыг судлах зайлшгүй шаардлага тавигддаг. Роботын кинематик нь тухайн биетийн хүчийг хянахгүйгээр түүний боломжит хөдөлгөөний хязгаарыг тодорхойлох процесс бөгөөд механикийн үндсэн хууль дээр тулгуурлан роботын бүтцэд тохируулж, тооцооллыг гүйцэтгэдэг.
Энэ хэсэгт бид энгийн хөдөлгөөнт роботын төрөл болох хөтлөгч бүхий хоёр үндсэн дугуйтай, дифференциал удирдлагатай хөдөлгөөнт роботын тооцооллыг авч үзъе. Дифференциал удирдлагатай робот нь хоорондоо үл хамаарах жолоодлого бүхий хоёр дугуйгаар тоноглогдсон. Роботын байрлал нь X, Y координатын тэнхлэг дээрх проекцууд болон хөдөлгөөний чиглэлийн 𝜑 өнцгөөр тодорхойлогдох бөгөөд явах чиглэл нь хоёр дугуйны төвийг дайрсан тэнхлэгтэй перпендикуляр байна . Үүнээс гадна дугуйг гулгалтгүйгээр эргэнэ гэж үзвэл дугуйны шугаман хурдыг дараах хэлбэрээр илэрхийлж болно.
𝑣=𝜔*r
Энд r – дугуйн радиус , 𝑣- дугуйны шугаман хурд, 𝜔- дугуйны өнцөг хурд.
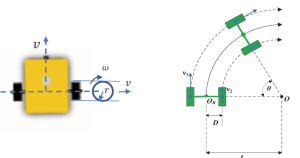
Дифференциал удирдлагатай роботын явах эд анги бүхий хоёр дугуйны тэнхлэг дээр роботын тэнхлэгийн төвийн цэг (OR) байрласан гэж үзвэл тухайн хугацааны эгшин дэх роботын хурдны өөрчлөлтөөр тодорхойлогдох роботын эргэлтийн радиус ба эргэлтийн төвийн өнцөг хурд 𝜔 =𝜑̇ байна.
Энд: 𝜑 – нь роботын эргэлтийн өнцөг юм.
Хоёр дугуйны хурдны өөрчлөлтөөр тодорхойлогдох дифференциал удирдлагатай хөдөлгөөнт роботын замчлал, түүний дүрслэлийг зураг 2–д харууллаа.
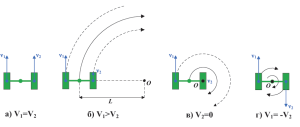
а. Зүүн ,баруун дугуй ижил хурдтай үед
б. Зүүн, дугуйны хурд баруун дугуйны хурднаас их үед
в. Баруун дугуйны хурд “0” үед
г. Зүүн, баруун дугуйны хурднууд эсрэг чиглэлтэй үед
Даалгавар 1.4.1: Тойргийн радиус r=5 см, π=3.14 бол тойргийн урт L болон диаметр d –г олох програмын кодыг бич.

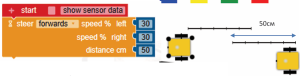
Даалгавар 1.4.2 Роботын зүүн болон баруун дугуйны явах хурдыг 30 хувиар, явах замын уртыг 50 см- ээр тохируулан програмын кодыг бич.
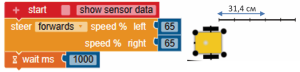
Даалгавар 1.4.3 Роботын дугуйны тойргийн радиус r=5 см, π=3.14 бол 1 cекундын хугацаанд робот ойролцоогоор 31,4 см шулуун замыг туулахын тулд моторын эргэлтийн хурдыг хэдээр сонгох вэ? Програмын кодыг бичиж туршилтын үр дүнгээр роботын моторын эргэлтийн хурдыг тохируулаарай.
Даалгавар 1.4.4 Роботын дугуйны тойргын радиус r=3.3 см бол робот нь эхлэх байрлалаас 42 см орчим яваад зогсох програмын кодыг бич.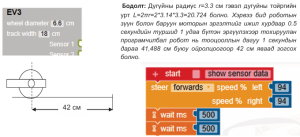
Даалгавар 1.4.5 Роботын зүүн, баруун дугуйны хурдыг тохируулан 20 см радиустай тойрог үүсгэн эргэлдэж явах роботын програмын кодыг бич.

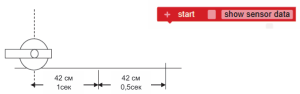
Даалгавар 1.4.6 Роботын дугуйны тойргын радиус r=3.3 см бол робот нь эхний 42 см замыг 2 секундэд явах ба дараагийн 42 см замыг 1 секундэд явахаар тооцоолон програмын кодыг
бич.
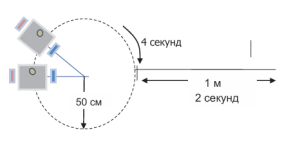
Даалгавар 1.4.7 Роботыг эхний 4 cекундэд 50 см-ийн радиустай нэг бүтэн тойрог үүсгэн эргэлдэх ба дараагийн 2 секундэд 1 метр шулуун явуулахаар тооцоолон програмын кодыг бич.
Даалгавар 1.4.8 Робот нь 50 см радиустай нэг бүтэн тойрог үүсгэн эргэлдэнэ. Үүний дараа:
-
40 см шулуун замыг 2 секундын хугацаанд туулна.
-
Дараагийн 40 см шулуун замыг 1 секундын хугацаанд туулна.
Дээрх хөдөлгөөнийг гүйцэтгэх програмын кодыг бич.
.